



: Samsung’s flip phone is cheaper, but is it better?")
")


Robots are incredibly precise, but being gentle is not always their strong suit. A machine that can build a car with near-perfect accuracy can still apply too much pressure when working in places where even the smallest mistake matters, like inside a human eye or during delicate surgery. That is why researchers at Shanghai Jiao Tong University are developing a new type of force sensor that could help robots “feel” what they are touching more accurately.
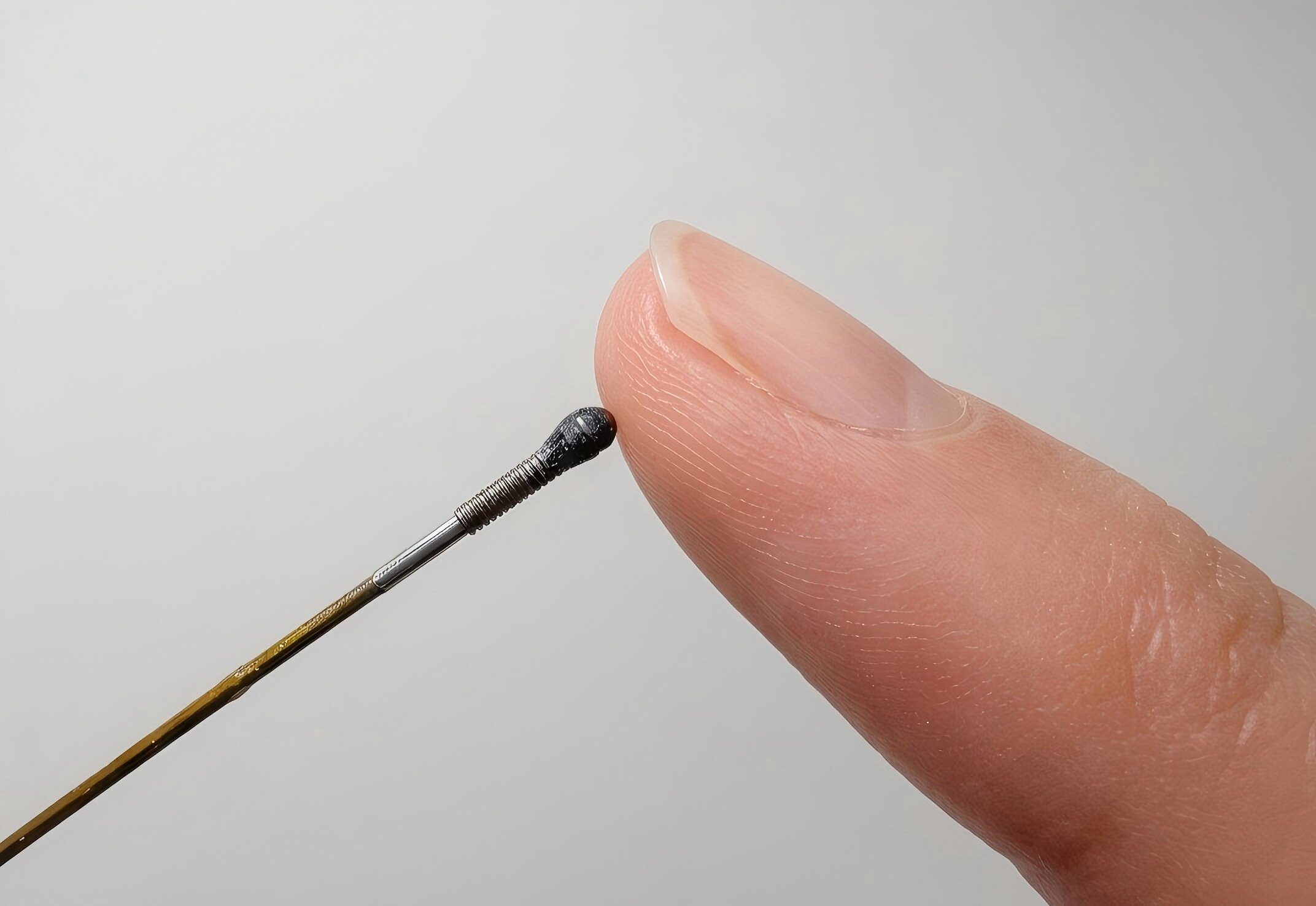
The sensor is tiny, about the size of a grain of rice at just 1.7 millimeters wide, making it small enough to fit inside advanced surgical tools. What makes it especially interesting is that it does not rely on traditional electronics. Instead, it uses light to measure force from every direction, including pressure, sliding movements, and twisting. Here is how it works. At the tip of an optical fiber sits a soft material that slightly changes shape when it comes into contact with something. That tiny deformation alters how light travels through the sensor. The altered light pattern is then sent through optical fibers to a camera, which captures it like an image. Researchers then use a machine learning model to study those light patterns and translate them into precise force readings. In simple terms, the system learns how to “read” touch through light alone, without needing a bunch of wires or multiple separate sensors packed into such a tiny space.
Why robots need to feel, not just see
Modern surgical imaging is already incredibly advanced. Surgeons today can see inside the human body with impressive clarity. But one thing they still struggle with, especially during minimally invasive procedures, is actually feeling what their tools are touching. A surgeon may be able to see the area clearly on a screen, but distinguishing between healthy tissue and something problematic often comes down to experience and instinct rather than feedback from the instrument itself.
That is exactly the problem this new sensor is trying to solve. During testing, researchers used it on a soft gelatin block with a small hard sphere hidden underneath, meant to mimic a tumor inside human tissue. The sensor detected the hidden object by sensing differences in stiffness as it moved across the surface. In robotic surgeries, where doctors operate in extremely tight spaces and cannot always rely on direct touch, this kind of tactile feedback could make procedures safer, more precise, and far less dependent on guesswork.
There’s still work to do before this reaches an operating room
Right now, these results are still more of a proof that the idea works rather than a finished medical breakthrough. The researchers themselves admit there is still a lot left to figure out. Building sensors this tiny with consistent quality at scale is much harder than making a single working version in a lab. The setup process also still needs to become simpler and more reliable before it can realistically be used in hospitals. On top of that, the sensor has not yet undergone the long-term stress testing that medical devices need before doctors would trust them during real procedures.

Even so, the core idea behind the technology feels genuinely promising. Instead of relying on multiple complicated sensing parts, the system uses a much simpler setup built around a single optical channel and a camera. That kind of simpler design often makes technologies easier to improve and scale over time once the engineering matures. The team is now working on fitting the sensor into actual robotic surgical tools and testing it in environments closer to real operating rooms. And while a sensor the size of a grain of rice that can “feel” may sound like a tiny innovation on paper, it could become incredibly important for surgeons guiding robotic instruments through spaces smaller than a fingernail.
